Abstract
"Objective Serious crashes are more likely when teenage drivers have teenage passengers. One likely source of this increased risk is social influences on driving performance. This driving simulator study experimentally tested the effects of peer influence (i.e., risk-accepting compared to risk-averse peer norms reinforced by pressure) on the driving risk behavior (i.e., risky driving behavior and inattention to hazards) of male teenagers. It was hypothesized that peer presence would result in greater driving risk behavior (i.e., increased driving risk and reduced latent hazard anticipation), and that the effect would be greater when the peer was risk-accepting.
Methods Fifty-three 16- and 17-year-old male participants holding a provisional U.S., State of Michigan driver license were randomized to either a risk-accepting or risk-averse condition. Each participant operated a driving simulator while alone and separately with a confederate peer passenger. The simulator world included scenarios designed to elicit variation in driving risk behavior with a teen passenger present in the vehicle.
Results Significant interactions of passenger presence (passenger present vs. alone) by risk condition (risk-accepting vs. risk-averse) were observed for variables measuring: failure to stop at yellow light intersections (Incident Rate Ratio (IRR)=2.16; 95% Confidence Interval [95CI]=1.06, 4.43); higher probability of overtaking (IRR=10.17; 95CI=1.43, 73.35); shorter left turn latency (IRR=0.43; 95CI=0.31,0.60); and, failure to stop at an intersection with an occluded stop sign (IRR=7.90; 95CI=2.06,30.35). In all cases, greater risky driving by participants was more likely with a risk-accepting passenger versus a risk-averse passenger present and a risk-accepting passenger present versus driving alone.
Conclusions Exposure of male teenagers to a risk-accepting confederate peer passenger who applied peer influence increased simulated risky driving behavior compared with exposure to a risk-averse confederate peer passenger or driving alone. These results are consistent with the contention that variability in teenage risky driving is in part explained by social influences."
1. Background
Adolescents in the US have higher crash-involvement rates than adult drivers (Bingham & Shope, 2005; National Highway Traffic Safety Administration, 2012), and die more often from injuries received in motor vehicle crashes than from any other cause (Centers for Disease Control and Prevention, 2014). Adolescents’ greater risk is attributable to multiple factors, including their status as novice drivers and their stage of development. Their inexperience as novice drivers results in risk taking due to ignorance of common driving hazards and/or lack of essential driving skills (Williams, 2006). As a result of their developmental stage, teens relative to adults are less mature emotionally, psychologically, and neurologically (Bingham, Shope, Zakrajsek, & Raghunathan, 2008; Keating, 2007), more prone to inattention (Lee et al., 2009), and have a heightened propensity for risk taking (Dunlop & Romer, 2010; Romer, 2010; Williams, 2003). Their crashes may be a product of lacking an appreciation of potential consequences of risk taking or purposefully taking risks (Simons-Morton, Ouimet, Zhang, Klauer, Lee, Wang, Chen, Albert, & Dingus, 2011a; Williams, 2003). Factors associated with increased fatal crash risk for adolescents include being male (Williams, 2003) and the presence of young passengers (Curry, Mirman, Kallan, Winston, & Durbin, 2012; Ouimet, Simons-Morton, & Zador, 2010). Fatal crash data indicate that adolescent drivers are more likely to crash when similar-aged passengers are present (in the absence of an adult passenger), an association that is especially true for male adolescent drivers (L.-H. Chen, Baker, Braver, & Li, 2000; Doherty, Andrey, & MacGregor, 1998; Ouimet et al., 2010). Passenger sex has also been found to moderate adolescent driving risk, with male passenger presence associated with higher-risk driving for both male and female adolescents compared to a female passenger or driving alone (Ouimet et al., 2010; Shepherd, Lane, Tapscott, & Gentile, 2011; Simons-Morton, 2005). These associations suggest that the social influences of peers might affect adolescent driving (Shope & Bingham, 2008).
Peers can have powerful influences on adolescent health risk behavior. While there are various forms of social influence, social norms and peer pressure are two types that have been found to motivate adolescent involvement in health risk behaviors (Simons-Morton & Chen, 2006), and may also influence risky driving (Simons-Morton, Ouimet, Zhang, Klauer, Lee, Wang, Chen, Albert, & Dingus, 2011b). Having friends who are risky drivers has been associated with adolescent risky driving behavior, suggesting that norms and/or pressure may influence risky teen driving (Simons-Morton, Ouimet, & Chen, 2012; Simons-Morton, Ouimet, Zhang, Klauer, Lee, Wang, Chen, Albert, & Dingus, 2011b). Recent experimental research supports the contention that the mere presence of a peer as a passenger or simply as an observer can increase risky driving (Chein, Albert, O'Brien, Uckert, & Steinberg, 2010; Shepherd et al., 2011; Simons-Morton et al., 2014). These data are consistent with the idea that reward salience is greater in the presence of adolescent peers, increasing the propensity to engage or accept higher than usual levels of risk (Steinberg, 2008).
Although the results of these studies are persuasive, evidence is lacking that performance on computerized driving games (Shepherd et al., 2011) or while in an functional magnetic resonance imaging (fMRI) scanner (Chein et al., 2010) is a valid predictor of everyday driving. In contrast, driving simulation has been shown to be an externally valid predictor of real-world driving (Fisher, Pradhan, Pollatsek, & Knodler, 2008), and provides a safe method for investigating peer influence on adolescent risky driving. Recent research using full-cab high-fidelity visually-immersive simulators provides evidence that social norms influence adolescents’ driving behavior. One such experiment demonstrated poorer hazard detection by male adolescents in the presence of a peer passenger (Ouimet et al., 2013). In another experiment, novice male adolescent drivers exhibited more high-risk driving behavior following a social norms manipulation leading them to believe that their same-sex passenger was risk-accepting compared to those perceiving their passenger as risk-averse (Simons-Morton et al., 2014). Although these studies are informative, the roles of social norms and peer pressure remain incompletely understood and neither previous simulated driving study directly manipulated peer pressure. Given the significance of these social influences in shaping adolescent behavior, and the need to reduce injury from crashes involving adolescent drivers, this area remains important for further study.
The Theory of Normative Social Behavior (TNSB) (Rimal, 2005) is a conceptual model positing that injunctive norms, defined as the perceptions of the behavioral expectations of salient others (e.g., peers, parents, teachers), influence behavior. Based on TNSB, it is logical to posit that in the presence of a salient peer who is perceived as preferring higher risk driving (e.g., norms favoring risky driving), an adolescent would be more likely to drive in a riskier manner than he would if driving alone or with a peer who prefers low-risk driving. In this way, injunctive norms influence volitional behavioral choices. However, evidence from available research is less clear regarding the influence of injunctive norms on unintentional behaviors, such as failure to attend to roadway hazards due to lack of skill or ability, or on learned risky behavior patterns that have achieved automaticity.
The study of social influences on risky driving is complicated by the susceptibility of novice teenagers to a variety of driving errors, which can be categorized as lapses, mistakes, and violations (A. J. McKnight & McKnight, 2000; Parker, Reason, Manstead, & Stradling, 1995; see Reason, 1990). Lapses are minor deviations from intentions, and typically contribute little to driver risk. Mistakes are the unintended failure to adequately perform an essential skill, and can arise from improper skill execution (e.g., due to distraction) or from the absence of essential skills. Violations result from a choice to disregard rules and regulations related to safety (Parker et al., 1995) and could be influenced by social influences to accept greater risk. Mistakes and violations are the most common contributors to crash risk. Violations may occur less frequently, but are most likely in response to an external factor, such as peer influence. Therefore, one would anticipate that peer influence in the form of risky driving norms and pressure would primarily influence violations, whereas mistakes would be less susceptible to peer influence, instead resulting in novice teen drivers due to their inexperience resulting in underdeveloped skills, and greater susceptibility to distraction, or inattention (Klauer et al., 2014).
The purpose of this research was to experimentally test the effects of passenger presence and social influence, in the form of injunctive norms and pressure, on the driving risk behavior (i.e., increased driving risk and reduced latent hazard anticipation) of male adolescent novices in a simulated driving task. It was hypothesized that: 1) peer passenger presence would result in greater driving risk behavior compared to driving alone; 2) social influences would moderate the association between passenger presence and driving risk behavior such that the effect of passenger presence would be even greater when accompanied by social influences that were risk-accepting compared to social influences that were risk averse; and 3) social influences would be greater in risk conditions consistent with intentional violation of safety-related roadway rules than in conditions consistent with mistakes or lapses due to the lack of skill or it's application.
2. Methods
2.1. Participants
Eligible participants included 16- and 17-year-old male drivers from Southeast Michigan, US who met the following inclusion criteria: had held a Level 2 Michigan driver license (i.e., independent driving with restrictions) for at least 4-8 months; drove twice or more weekly; had normal or corrected-to-normal vision using contact lenses; and passed a sensitivity to simulator sickness survey. These criteria were measured during recruitment as part of a telephone-based screening. Eyeglasses were disallowed due to interference with the eye tracking system. Of the original 75 eligible adolescents, 17 participated in pilot testing. Of the 58 remaining, five were unable to complete the experimental protocol, four due to simulator sickness, and one due to a simulator malfunction, resulting in a total sample of 53 (M age=16.9; SD=0.34). The majority of participants were in 11th grade (77%), and white (77%) (see Table 1). Each participant was compensated $50. The University of Michigan Institutional Review Board approved the study procedures. Participants were told that the study purpose was to examine the physiology of driving.
Table 1
Sample demographic characteristics (N = 53)
Risk condition | |||||
Risk-accepting (n = 29) | Risk-averse (n = 24) | ||||
N | n | % | n | % | |
Grade | |||||
10 th | 2 | 0 | 0.0 | 2 | 100.0 |
11 th | 41 | 27 | 65.9 | 14 | 34.2 |
12 th | 7 | 0 | 0.0 | 7 | 100.0 |
Race | |||||
White | 41 | 24 | 58.5 | 17 | 41.5 |
Black | 4 | 2 | 50.0 | 2 | 50.0 |
Other | 5 | 1 | 20.0 | 4 | 80.0 |
Hispanic/Latino | |||||
Yes | 2 | 0 | 0.0 | 2 | 100.0 |
No | 48 | 27 | 56.3 | 21 | 43.8 |
Vehicle use | |||||
Teen exclusively | 30 | 19 | 63.3 | 11 | 36.7 |
Shared with family | 20 | 8 | 40.0 | 12 | 60.0 |
Driving frequency | |||||
Every day/almost every day | 29 | 17 | 58.6 | 12 | 41.4 |
5 or 6 days per week | 14 | 7 | 50.0 | 7 | 50.0 |
3 or 4 days per week | 4 | 1 | 25.0 | 3 | 75.0 |
1 or 2 days per week | 3 | 2 | 66.7 | 1 | 33.3 |
Note. The numbers may not add to the total due to missing values. Chi square tests revealed no significant differences for all variables except grade (Χ2 = 16.4, p < .001) but the results should be used with caution because many cell sizes are less than 5. Of 75 recruited, 4 were lost due to simulation sickness and 1 due to technical problems during the drives, and 17 participated in pilot testing.
2.2. Procedures
A crossover mixed randomized experimental design was used. The two counterbalanced within-subjects driving trials were passenger presence (solo drive and passenger drive), and a between-subjects driving risk behavior condition represented passenger type (risk-accepting or risk-averse) (see Figure 1). At the experimental session, participants completed a pre-drive survey, and then joined a confederate posing as a second, similar-aged participant in the driving simulator lab. The experimental manipulation included specific injunctive norms and peer pressure to modify driving behavior. Injunctive norms were manipulated by the confederate excusing his late arrival to the appointment followed by a video rating task. In the risk-averse condition the late-arriving confederate said, “Sorry I was a little late getting here. I tend to drive slower, plus I hit every yellow light.” In the risk-accepting condition the confederate said, “Sorry I was a little late getting here. Normally I drive way faster, but I hit like every red light.”
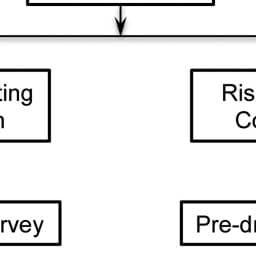
Figure 1 Study design and flowchart
Two drives followed a practice drive, (passenger present first, or solo first, counterbalanced at random, each lasting 10-15 minutes). Before the passenger drive, the confederate and participant watched two short videos together of driving on a freeway showing low-risk and high-risk driving. Video views were from the front right-side passenger seat and the order was counterbalanced. The low-risk video showed a vehicle being driven carefully. The high-risk video displayed a vehicle being raced at high speed through traffic. After watching each video, the participant and then the confederate were asked two questions on a 10-point scale: 1) “How similar is your driving to the driver in the video?” (1=not at all similar to 10=highly similar); and 2) “How likely would you be to ride with the person in this video?” (1=not at all likely to 10=highly likely). Relative to the participant, the confederate's response was less risky in the risk-averse risk condition and more risky in the risk-accepting condition.
Before the solo drive, participants were asked to do a word puzzle for five minutes where they identified as many words as possible in a square field of letters in rows and columns. This task provided separation similar in length to that between the introduction to the confederate and the solo drive so that any lingering effects of the coaching/practice drive and the passenger drive could dissipate. Both drives represented realistic, ecologically valid drives containing prescripted scenarios eliciting driver responses. These responses were measured so that differences in driving risk behavior could be compared between the experimental conditions. The scenarios minimized the chance of crashes, loss of control, or events that might induce hyper-alertness in order to avoid reduced internal validity.
In both risk conditions, prior to the passenger drive the participant and confederate were told to imagine that they were going to a concert by their favorite artist, and would start and the doors would close in 20 minutes. They were also told that driving to the concert venue took 16 minutes following the correct route, and that the passenger would navigate using a map. The confederate and participant together were told that they had been assigned to different groups; the participant to the driver group, and the confederate to the passenger group. The experimental drives were then completed.
In the passenger drive, the confederate gave directions (e.g., turn left at the stop sign, continue straight at the light) while seated in the front right-side passenger seat. While giving directions, the confederate delivered the second experimental manipulation. Without prescribing behaviors (e.g., Drive faster! Hurry! Slow down!) peer pressure was imposed by statements reflecting a modest desire to go faster (risk-accepting condition) or proceed slower (risk-averse condition) (e.g., noting that the speed limit is 70mph [risk accepting]; pointing out a reduced speed zone [risk averse]). The participant and confederate were told to focus on driving and giving directions, respectively. Verbal comments and directions were given at the same points in every passenger drive. The participant drove alone in the solo drive and was guided by construction barrels (not present in the passenger drive) to guide navigation by blocking exits from the intended course. To minimize bias, the confederate remained blind to the study condition until immediately prior to entering the simulator lab. The experimenter was blind until hearing the confederate's script. A post-drive survey and debriefing tested the deception and experimental manipulation.
There were two versions of the simulated world. Both versions had four segments (i.e., residential, rural, urban, and freeway) ordered differently and populated with their own details (e.g., buildings and landscape) to alter appearance; however, both versions had identical roadway types, driving scenarios, and driving risk behavior measures. The versions were counterbalanced to reduce learning effects. Teen assent and parental consent were obtained for each participant.
2.3. Driving Simulator
A fixed-base high-fidelity simulator located in a dedicated lab space was used for this study. The simulator comprised a full vehicle cab (Nissan Versa) surrounded by three forward screens and one rear screen. The forward screens were projected at a resolution of 1400 X 1050 pixels each and the rear screen at 1024 X 768 pixels each, providing a 120-degree forward field of view and a 40-degree rear field of view. The simulator ran RTI's (Realtime Technologies, Inc., Royal Oak, MI, US) SimCreator software. The simulator system included steering feedback, road vibration, a virtual LCD instrument cluster and side-view mirrors, and simulated audio. A four-camera remote-mounted eye-tracking system manufactured by Smart Eye AB, Sweden was integrated into the driving simulator system and used to measure participants’ eye movements and gaze location. The driving simulator recorded vehicle and driving performance data, up to six synchronized channels of video and two channels of audio at 30 Hz. Eye tracker data were recorded at 60 Hz.
2.4. Measures
2.4.1. Dependent Measures
The measures for this study are detailed in Table 2. The dependent measures of driving risk behavior were classified either as risky driving behaviors or hazard anticipation. These two groups of variables were measured using data from the driving simulator and/or the eye-tracking system. Risky driving behavior represented risks that resulted from violations due to the participant's driving decisions (e.g., continue through an intersection on a yellow light), and included time in red, failed to stop, left turn latency, and overtaking. Of these measures, two related to decision making involving stop signal dilemmas at four-way intersections (i.e., time in red and failed to stop [see below]); one evaluated left turn decisions (i.e., left turn latency); and one related to passing a lead vehicle (i.e., overtaking). These four risky driving scenarios were selected because they are common driver behaviors and relevant to real-world crash risk at red light intersections (Retting, Ulmer, & Williams, 1999) left-hand turn intersections (Bingham & Ehsani, 2012; X. Wang & Abdel-Aty, 2008) and while overtaking on two-way rural roads (Khorashadi, Niemeier, Shankar, & Mannering, 2005; Nordfjærn, Jørgensen, & Rundmo, 2010) (see Table 2).
Table 2
Simulator and survey measures
Content | Coding | Measurement | Citations | |
Dependent Variables | ||||
Risky Driving Behaviors | ||||
Failed to Stop | Measured whether or not a stop was made at a red light | 0=Light run, 1=Stopped | Yellow light phase change at three times-to-intersection: 2.3, 2.6, or 2.9. Each changeover interval presented 3 times per drive | |
Time in Red | Measured how much time was spent within an intersection while the light was red | The proportion of total time spent in each dilemma intersection during which the light was red, averaged across all nine dilemma intersections | Measured across 20 intersections per drive | |
Left Turn Latency | Presented participant with a green light and oncoming traffic programmed to be continuous with 3-4 second gaps | The number of cars allowed to pass before the turn was executed | Presented once per drive | Developed for this study |
Overtaking | Presented participant with slower moving vehicle that they could choose to pass or not | 0=did not pass, 1=passed | Presented once per drive | Developed for this study |
Latent Hazard Anticipation | ||||
Intersection Scanning | Two measures: Turning and Traversing | |||
Traversing | Traversing assessed hazard-scanning behavior while crossing straight through four-way intersections | 0=did not scan, 1=scanned | Measured at 8 intersections per drive | ;
Pradhan, Pollatsek, Knodler, & Fisher, 2009 ;
|
Turning | Turning was measured at four-way intersections while turning either left or right | 0=did not scan, 1=scanned | Measured at ten intersections per drive | ;
Pradhan, Pollatsek, Knodler, & Fisher, 2009 ;
|
Latent Hazard Scanning | Evaluated at locations where potential hazards might exist, but could be hidden from view (e.g., passing a delivery van parked just before a crosswalk, vegetation blocking a clear view of pedestrian and vehicular cross traffic at intersections) | 0=did not scan, 1=scanned | Measured at 6 intersections per drive | ;
Pradhan, Pollatsek, Knodler, & Fisher, 2009 ;
|
Occluded Stop Sign | Assessed at stop sign-controlled intersection where vegetation partially blocked the driver's view of the stop sign | 0=did not scan, 1=scanned | Presented once per drive | ;
Pradhan, Pollatsek, Knodler, & Fisher, 2009 ;
|
Independent Variables | ||||
Passenger Presence | Measured the effect of passenger presence | Solo drive or passenger drive | Each participant experienced each condition once | |
Risk Condition | Measured peer influences on driving | Risk-accepting or risk-averse passenger | Participants assigned at random to one of the other condition | |
Manipulation Checks | ||||
Resistance to Peer Pressure | Measured susceptibility to peer pressure by asking participants to choose the statement that best described them and then rate how true that statement was of them | 10 paired items asking participants to choose the statement that best described them and then rate how true that statement was of them: 1=sort of true of me, 4=really true of me | Measured in advance survey 7-10 days before simulator appointment | |
Friends’ Approval of Risky Driving | Asked how likely participants’ friends were to approve of 11 risky driving behaviors | 11-item scale with responses 1=very unlikely; 2=unlikely; 3=neither likely nor unlikely; 4=likely; 5=very likely) | Measured in advance survey 7-10 days before simulator appointment | |
Friends’ Risk Behavior | Measured the substance use behavior of participants’ friends | 4-item scale with responses 1=none, 2=a few, 3=some, 4=most, 5=all | Measured in advance survey 7-10 days before simulator appointment | |
Friends’ Risky Driving | Measured perceptions of friends’ risky driving | 19-item scale with responses 1=none, 2=a few, 3=some, 4=most, 5=all | Measured in advance survey 7-10 days before simulator appointment | Simons-Morton, Ouimet, Zhang, Klauer, Lee, Wang, Chen, Albert, & Dingus, 2011a |
Driving Risk Perceptions | Measured perceptions of the level of risk of 24 driving behaviors | 24-item scale with responses 1=lowest risk to 5=highest risk | Measured in advance survey 7-10 days before simulator appointment | ;
|
Passenger Risk Acceptance | Measured perceptions of driving risk | 18-item scale with responses 1=very unlikely; 2=unlikely; 3=neither likely nor unlikely; 4=likely; 5=very likely | Measured in post-drive survey | |
Identification with Passenger | Measured participants whether or not they identified personally with the passenger | 7-item scale with responses 1=no, 2=maybe, 3=yes | Measured in post-drive survey | Developed for this study |
Perceived Passenger Approval of Risky Driving | Measured how likely it was that the passenger (i.e., confederate) approved of five risky driving behaviors | 5-item scale with responses 1=very unlikely; 2=unlikely; 3=neither likely nor unlikely; 4=likely; 5=very likely | Measured in post-drive survey | Developed for this study |
Passenger Pressure | Measured how much pressure participants felt from the passenger to perform 10 driving-related safe and risky behaviors | 10-item scale with responses 1=none to 7=a lot | Measured in post-drive survey | Developed for this study |
Hazard anticipation measured errors (mistakes or lapses) that related to the omission of safe driving behaviors involving the anticipation of latent hazards (e.g., hazards that are possible given the circumstances, such as the view of a pedestrian crossing being blocked by a parked delivery van). These included intersection scanning, latent hazard scanning, and occluded stop sign scenarios. In all, there were scenarios at 8 intersections with Traversing, 10 with Turning, and 6 with Latent Hazard Anticipation scenarios. These were based on scenarios that were previously successfully used in driving simulator studies to measure hazard anticipation skills in drivers (Pradhan et al., 2005; Pradhan, Pollatsek, Knodler, & Fisher, 2009; Pradhan, Fisher, & Pollatsek, 2006). Failure to look, see, and react to potential hazards may be considered a driving mistake or lapse in skill, attention, or judgment (see Table 2).
2.4.2. Independent Measures
Independent measures for this study were passenger presence (solo drive or passenger drive) and risk condition (risk-accepting or risk-averse passenger) (see Table 2).
2.4.3. Randomization and Manipulation Checks
The measures used in this study to conduct checks of randomization and effectiveness of the experimental manipulation were assessed by two on-line surveys: the first was administered 7-10 days in advance of the simulator experiment (advance survey) as part of an fMRI session (results of the fMRI research are not included in this paper); the second was completed immediately following the simulator experiment (post-drive survey). The constructs measured to check randomization were selected because prior research indicated they are associated with risky driving (Arnett, 1992; Chein et al., 2010; Dunlop & Romer, 2010; Keating & Halpern-Felscher, 2008; Steinberg, 2011), and because differences in these measures remaining after randomization could bias the results. The post-drive survey was developed to test the success of the experimental manipulation of social norms. See Table 2 for measures descriptions and Table 3 for descriptive statistics.
Table 3
Survey measures by study condition (n = 53)
# of Items | Range a | Alpha b | Total | Risk condition | |||||
Risk- averse (n = 29) | Risk-accepting (n = 24) | ||||||||
M | SD | M | SD | M c | SD | ||||
Advance Survey | |||||||||
Resistance to peer pressure | 10 | 1-4 | 0.51 | 2.60 | 0.47 | 2.58 | 0.53 | 2.63 | 0.40 |
Friends’ approval of risky driving | 11 | 1-5 | 0.81 | 2.92 | 0.63 | 2.80 | 0.67 | 3.07 | 0.55 |
Friends’ risk behavior | 4 | 1-5 | 0.88 | 2.03 | 0.84 | 2.04 | 0.87 | 2.03 | 0.83 |
Friends’ risky driving | 19 | 1-5 | 0.86 | 2.34 | 0.50 | 2.35 | 0.53 | 2.32 | 0.47 |
Driving risk perceptions | 24 | 1-5 | 0.86 | 3.66 | 0.41 | 3.68 | 0.42 | 3.63 | 0.41 |
Post Drive Survey | |||||||||
Risk perception of passenger | 18 | 1-5 | 0.97 | 2.53 | 1.16 | 1.56 * | 0.44 | 3.69 * | 0.46 |
Identification with passenger | 6 | 1-3 | 0.86 | 1.77 | 0.75 | 1.69 | 0.81 | 1.88 | 0.68 |
Passenger approval | 5 | 1-5 | 0.96 | 2.80 | 1.39 | 1.68 * | 0.51 | 4.16 * | 0.72 |
Passenger pressure | 10 | 1-7 | 0.86 | 3.25 | 1.29 | 2.46 * | 1.03 | 4.22 * | 0.84 |
Sensation Seeking | 40 | 0-40 | 0.86 | 18.67 | 7.17 | 18.56 | 7.57 | 18.65 | 6.83 |
Differences are statistically significant.aHigher scores represent greater resistance, approval, and driving risk perceptions.bStandardized Cronbach's alpha coefficients are for the current study.cIndependent t-tests were used to conduct the mean comparisons.
Measures administered in the advance survey assessed Resistance to Peer Pressure (Steinberg & Monahan, 2007), Friends’ Approval of Risky Driving (Chawla, Neighbors, Logan, Lewis, & Fossos, 2009), Friends’ Risk Behavior (Simons-Morton et al., 2012), Friends’ Risky Driving (Simons-Morton, Ouimet, Zhang, Klauer, Lee, Wang, Chen, Albert, & Dingus, 2011a), and Driving Risk Perceptions (Hartos & Simons-Morton, 2006; Simons-Morton et al., 2012). Measures given in the post-drive survey included Passenger Risk Acceptance (adapted from Ouimet et al., 2013), Identification with Passenger (Developed for this study), Perceived Passenger Approval of Risky Driving (Developed for this study), and Passenger Pressure (Developed for this study) (Table 2).
2.5. Data Analysis
Driving behavior was compared for passenger presence (i.e., solo vs. passenger present) and risk condition (risk-averse vs. risk-accepting passenger). In preliminary analyses, risk-averse and risk-accepting groups were compared on the advanced-survey covariates to test adequacy of random assignment and on measures of participants’ perceptions of the confederate to confirm the experimental manipulation of injunctive norms. Possible carry-over effects of the drive order (solo first vs. passenger present first) were tested within each risk condition, and none were identified.
The primary driving performance comparisons were to examine main and interaction effects of the risk condition and passenger presence to test study hypotheses for risky driving behaviors and hazard anticipation. Generalized linear mixed models were estimated using three distributions: a binomial distribution for Failed to Stop, Intersection Scanning (Turning and Traversing), Latent Hazard Scanning, and Occluded Stop Sign; a binary distribution for Overtaking, and a Poisson distribution for Left Turn Latency. A mixed model was used for Time in Red. As an additional precaution against carry-over effects, all models testing study hypotheses were adjusted for the order in which the drives were completed. SAS (version 9.2) PROC GLIMMIX and PROC MIXED were used for all hypothesis-testing models.
3. Results
3.1. Test of Randomization
Randomization was tested by comparing participants from the two risk conditions (risk-averse vs. risk-accepting) on months of licensure and covariates measured in the advance survey. There was no significant difference (t(51)= −0.24, p = .81) in the mean number of months of licensure between the risk-averse (M = 7.98 and SD = 4.13) and the risk-accepting (M = 7.76 and SD = 2.00) groups. Furthermore, no between-group differences were found for any of the advance survey covariates. These results indicate that randomization was successful in forming experimental groups that did not differ in a variety of important potential confounding characteristics (Table 3).
3.2. Experimental Manipulation Check
Participants’ perceptions of the passenger measured post drive were compared by risk condition to check that the manipulation was effective. Compared to the risk-averse condition, the passenger in the risk-accepting condition was perceived as more risk-accepting, and applied more peer pressure to drive in a risky manner, and approved more of participants’ risky driving). No differences were found in identification with the confederate (Table 3). These results indicate that the experimental manipulation was successful in altering injunctive norms and perceived pressure, while not altering the participants’ identification with the confederate (a potential confounder). These results were supported by participants’ subjective impressions of the confederate shared during a debriefing session.
3.3. Effects of Risk Condition and Passenger Presence
Figure 2 illustrates significant interactions of risk condition and passenger presence. In general, when driving with a passenger, participants in the risk-accepting condition drove in a manner that was riskier and less cautious compared to those in the risk-averse condition (see Table 4 for results). This included having a higher probability of Failing to Stop (IRR = 2.16, 95% CI [1.06, 4.43], p = .04) (Figure 2.1), shorter Left Turn Latency (IRR = 0.43, 95% CI [0.31, 0.60], p < .001) (Figure 2.2) and higher probability of Overtaking (IRR = 10.17, 95% CI [1.43, 73.35], p = .02) (Figure 2.3). Those in the risk accepting condition had a lower probability of stopping at the Occluded Stop Sign (IRR = 7.90, 95% CI [2.06, 30.35], p < .001) (Figure 2.4) compared to the risk-averse condition with the passenger present (due to the strong interaction of risk condition and passenger presence the main effects for Overtaking and Occluded Stop Sign cannot be interpreted). Additionally, differences in patterns of change between solo and passenger driving trials were apparent, with the probability of Failing to Stop and of Overtaking being greater in the passenger than in the solo drive for participants in the risk-accepting condition, and the opposite in the risk-averse condition (Figures 2.1 and 2.3). The probabilities for the left turn latency and occluded stop sign scenarios showed similar patterns to Failing to Stop and Overtaking, except that the two conditions crossed over between the two trials. This indicates that the probability of detection and latency were greater for the risk-averse compared to the risk-accepting condition during the solo drive, but higher for the risk-averse and lower for the risk-accepting condition during the passenger drive (see Figures 2.2 and 2.4).
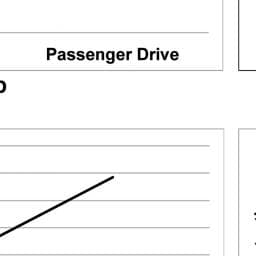
Figure 2 Interactions between risk condition and passenger presence
Table 4
Effects of risk condition and passenger presence on binomial and count outcome variables
Dependent Measure | Effects | IRR | 95% CI | p |
Failed to Stop | Risk condition | |||
Risk-accepting | 1.55 | 0.44 | 5.51 | 0.49 |
Risk-averse | 1.00 | |||
Passenger presence | ||||
Passenger | 0.85 | 0.55 | 1.31 | 0.45 |
Solo | 1.00 | |||
Condition*Presence | 2.16 | 1.06 | 4.43 | 0.04 |
Left Turn Latency ‡ | Risk condition | |||
Risk-accepting | 1.31 | 0.80 | 2.16 | 0.28 |
Risk-averse | 1.00 | |||
Passenger presence | ||||
Passenger | 1.25 | 1.01 | 1.56 | 0.04 |
Solo | 1.00 | |||
Condition*Presence | 0.43 | 0.31 | 0.60 | <.001 |
Overtaking † | Risk condition | |||
Risk-accepting | 2.05 | 0.52 | 8.03 | 0.30 |
Risk-averse | 1.00 | |||
Passenger presence | ||||
Passenger | 0.70 | 0.21 | 2.34 | 0.55 |
Solo | 1.00 | |||
Condition*Presence | 10.17 | 1.43 | 73.35 | 0.02 |
Occluded Stop Sign | Risk condition | |||
Risk-accepting | 0.32 | 0.11 | 0.89 | 0.03 |
Risk-averse | 1.00 | |||
Passenger presence | ||||
Passenger | 0.25 | 0.10 | 0.63 | <.001 |
Solo | 1.00 | |||
Condition*Presence | 7.90 | 2.06 | 30.35 | <.001 |
Intersection Scanning (Turning) | Risk condition | |||
Risk-accepting | 1.02 | 0.59 | 2.02 | 0.82 |
Risk-averse | 1.00 | |||
Passenger presence | ||||
Passenger | 1.02 | 0.59 | 1.74 | 0.95 |
Solo | 1.00 | |||
Condition*Presence | 0.77 | 0.35 | 1.66 | 0.49 |
Intersection Scanning (Traversing) | Risk condition | |||
Risk-accepting | 0.80 | 0.43 | 1.49 | 0.49 |
Risk-averse | 1.00 | |||
Passenger presence | ||||
Passenger | 0.62 | 0.40 | 0.96 | 0.03 |
Solo | 1.00 | |||
Condition*Presence | 0.87 | 0.45 | 1.66 | 0.67 |
Latent Hazard Scanning | Risk condition | |||
Risk-accepting | 0.79 | 0.44 | 1.42 | 0.42 |
Risk-averse | 1.00 | |||
Passenger presence | ||||
Passenger | 0.86 | 0.53 | 1.40 | 0.53 |
Solo | 1.00 | |||
Condition*Presence | 0.70 | 0.34 | 1.44 | 0.33 |
RR = incident risk ratio; 95% CI = 95% confidence interval.
The main effects of risk condition (risk-accepting vs. risk-averse) and passenger presence (solo vs. passenger) were tested while controlling for the order in which the drives occurred (shown in Table 4). Significant main effects of passenger presence was found for the occluded stop sign (IRR = 0.25, 95% CI [0.410, 0.63], p = .03) and intersection scanning (traversing) (IRR = 0.62, 95% CI [0.40, 0.96], p = .03), indicating that when a passenger was present participants were less likely to detect and respond to the occluded stop sign and to scan for hazards when traversing straight through the intersection (Table 4). No significant main or interaction effects were found for intersection scanning (turning), latent hazard scanning (Table 4) and percent time in red (Table 5).
Table 5
Associations of risk condition and passenger presence with a continuous outcome variable
Dependent Measure | Effects | B | 95%CI | p |
Percent time in Red | Risk condition | |||
Risk-accepting | 4.85 | −4.49 | 14.19 | 0.30 |
Risk-averse | Ref | |||
Passenger presence | ||||
Passenger | −1.41 | −6.61 | 3.79 | 0.59 |
Solo | Ref | |||
Condition*Presence | 1.91 | −5.90 | 9.73 | 0.63 |
95% CI = 95% confidence interval.
4. Discussion
This study systematically tested the effect of male peer passengers on risk-taking and hazard anticipation in a driving simulator. Three hypotheses were tested: 1) peer passenger presence would result in greater driving risk behavior (i.e., increased driving risk and reduced latent hazard anticipation) compared to driving alone; 2) social influences would moderate the association between passenger presence and driving risk condition such that the effect of passenger presence would be even greater when accompanied by social influences that were risk-accepting compared to social influences that were risk averse; and 3) social influences would be greater in risk conditions consistent with intentional violation of safety-related roadway rules than in conditions consistent with mistakes or lapses due to the lack of skill or it's application. The results indicated that among recently licensed male teenagers, risk-accepting social influences (i.e., injunctive norms and peer pressure) in the presence of a peer passenger increased risk-taking compared to driving alone or with a risk-averse peer passenger. In addition, the results indicate a trend toward reduced driving risk behavior when the passenger was risk averse. The results also demonstrated some evidence that mere passenger/peer presence increased driving risk behavior, similar to previous findings (Chein et al., 2010; Simons-Morton et al., 2014). This effect would be expected to be larger in the presence of actual friends or more than one peer than in this study. Generalization of these results to real-world driving sheds light on the role of social influences on the driving risk behavior of male teenage drivers, and further establishes the role of these influences as contributors to the observed association between peer-passenger presence and fatal crash involvement of teen drivers (L.-H. Chen et al., 2000; Williams, 2003). Further, the reduced driving risk behavior in the risk-averse condition provides some evidence that peer passengers can have a risk-dampening influence on male teen drivers. This has been found in prior naturalistic observation research, but with female rather than male passengers (Simons-Morton, 2005).
Although the evidence that social influences can lead to greater risk taking while driving was fairly consistent, the effects of social influences on latent hazard anticipation were less evident. Of the four measures of latent hazard anticipation, only one showed any effect of social influences. Detection of an occluded stop sign showed a main effect of social influences (i.e., risk condition) and a significant interaction with passenger presence in which response to the stop sign was less likely when the passenger exerted risk-accepting peer influences. However, the interpretation of this effect is not clear, as this measure is a hybrid task that could be associated with greater risk-taking or poorer latent hazard anticipation. This scenario was positioned at a four-way residential intersection, and the sign was blocked from view by foliage until the participant was near the intersection. Having a passenger could increase interference with the driving task, such as inattention or distraction, resulting in failure to detect and therefore stop for the sign. However, the presence of a risk-accepting passenger could also lead the participant to intentionally opt for the higher risk behavior of continuing through the intersection without stopping. This latter scenario is made more likely by the slow vehicle speed (i.e., speed limit was 25 mph), which might have allowed last minute checking for traffic before either braking or entering the intersection. Given that the participants were significantly more likely to continue through the intersection when a risk-accepting passenger was present, versus a risk-averse passenger, and that this was accompanied by a significant moderating effect of social influences in the presence of a passenger, it can be concluded that the effect was more likely due to greater risk taking; however, the main effect of passenger presence suggests there may have also been some other effect associated with the mere presence of a passenger (e.g., inattention, distraction, cognitive load). Overall, these results generally support prior studies, demonstrating the effects of peer presence in promoting risky driving behaviors among teens (Ouimet et al., 2013; Pradhan et al., 2014; Shepherd et al., 2011; Simons-Morton et al., 2014; White & Caird, 2010), and generalization of these results to real-world driving further establishes social influences in the form of injunctive norms reinforced by peer pressure as a potential contributor to the observed association between peer-passenger presence and fatal crash involvement of teen drivers (L.-H. Chen et al., 2000; Ouimet et al., 2010; Williams, 2003).
Although the results of this study are compelling, other studies have supported different conclusions. A naturalistic study of teen driving found no evidence that teenage passengers increased teen driver involvement in crash/near crash situations or risky driving (Simons-Morton, Ouimet, Zhang, Klauer, Lee, Wang, Chen, Albert, & Dingus, 2011a). The differences between this naturalistic study and the results of the current research may be attributable to several factors. Notably, the current study provided separate evaluations of risk due to choice and risk due to insufficient, unapplied or poorly executed skill, particularly with respect to driving behavior in the presence of passengers and resistance to peer influence, while the previous study did not make this distinction. Second, the current study experimentally controlled the risk level of injunctive norms by manipulating passenger type (i.e., risk-accepting vs. risk-averse), while the previous study did not. Finally, risk appears to vary according to individual differences among drivers, possibly in characteristics such as reward salience or sensitivity to social exclusion or social rewards (Chein et al., 2010; Falk et al., 2014). A previous study by this group also supported this conclusion, showing that teens who were more sensitive to social exclusion based on brain scans were also more likely to drive in a riskier manner in the simulator when a passenger was present versus driving alone, while controlling for passenger norms (Falk et al., 2014). Thus, it may be the case that peer passengers tend to promote riskier teenage driving by increasing reward sensitivity, consistent with broader accounts of increased reward salience in teens (Albert & Steinberg, 2011), but that this influence is moderated by individual differences in sensitivity to potential social rewards or punishments. The studies also support a link between social influences and active engagement in risky driving behavior, but do not provide much information regarding the potential for peers to increase the risk of teenage drivers by reducing attention to hazards. This is a topic for future research.
The Theory of Normative Social Behavior posits that human behavior is influenced by social norms that are demonstrated in society broadly and perceived in the expectations of others. In this study, risk-accepting social influences affected volitional choices by participants to continue through rather than stop at an intersection with a yellow light, overtake a slightly slower lead vehicle rather than allow more time for it either to accelerate or to leave the road, and make a left turn through heavy traffic without waiting long for a larger gap or safer opportunity to turn. Although these behaviors are not violations in the legal sense, they do increase crash risk. There was less evidence that social influences affected hazard anticipation, consistent with a failure to execute a skill-based behavior, in this case to detect hazards (Reason, 1990). There are two explanations of the poor anticipation of hazards observed in this study that should be examined in future studies. One explanation is that good hazard anticipation skills (e.g., where and when to focus attention) have not yet developed in novice teens, and therefore could not be applied fairly to the situations presented in the driving simulation (i.e., a floor effect would minimize the potential to detect differences). A second explanation is that the presence of a peer passenger could interfere with the task of detecting hazards through mechanisms such as inattention, distraction, or increased cognitive load.
Risky driving due to the commission of violations could be addressed by adapting interventions that change norms and attitudes of drivers and passengers (Carins & Rundle-Thiele, 2014; Janssen, Mathijssen, van Bon-Martens, van Oers, & Garretsen, 2013; Lumpkins et al., 2015) to address the driving context, \by actual or perceived likely legal enforcement of traffic violations (Quackenbush, 2011), or parental management of risky driving behavior (Simons-Morton, Ouimet, Zhang, Klauer, Lee, Wang, Chen, Albert, & Dingus, 2011b). The effectiveness of changes in social norms and strong enforcement is evident in changes in safety belt use when there was no law compared to secondary, and to primary enforcement plus public campaigns to alter attitudes and expectations (Beck & Shults, 2009; Shults & Beck, 2012); however, despite big increases, teenagers have among lowest use rates (Williams & Tefft, 2014). The high effectiveness of red-light cameras in reducing red-light running is another example (Retting, Ferguson, & Farmer, 2008; Retting, Ferguson, & Hakkert, 2003; Shin & Washington, 2007); however, the effects of this approach has not been studied in young drivers, per se. Mistakes in driving, however, might best be reduced by promoting the early development and use of appropriate higher-order driving skills, such as latent hazard anticipation. For example, hazard anticipation training shows promise as a potentially effective approach to addressing deficits in attention, scanning, and anticipation of roadway hazards, especially in less experienced drivers (Fisher et al., 2008; Pradhan et al., 2006; 2009). Additional research is needed to determine the persistence of these training effects on driver behavior and performance.
4.1. Strengths and Limitations
Strengths of this research include high experimental control of potential confounding and target variables, an effective confederate passenger deception, and external validity provided by a high-fidelity simulator to assess risky driving. However, generalization of the study findings is limited by the inclusion of only male teenage novice drivers. Likewise, study participants were closely clustered around average rates of resistance to peer influence for this age group (Steinberg & Monahan, 2007), so it is unclear to what extent these findings would generalize to participants with weaker resistance to peer influences. Although we are confident that the pre-drive manipulation of injunctive norms was effective, given the expected group differences around risk acceptance and post-drive measures of the experimental manipulation, further dissection of the effective components of the experimental manipulation should be examined in future studies. For example, although the use of an age-peer confederate passenger allowed substantial experimental control, it may have provided participants with an artificial experience compared to the influence of actual friends. Also, the confederate exerted minimal pressure within the driving environment, which suggests that the results may underestimate the effect of peer influence in the real world.
4.2. Summary and Conclusions
The present study provided a systematic test of social influences on male teenage driving risk behavior. The moderation by social influences of the association between simulated risky driving and passenger presence supports the contention that social influences affect driving risk behavior. This is consistent with research on other behaviors and with social norms theory, which posits that all other things being equal people conform to the norms of others by modifying their behavior (Cialdini, 2009; Rimal, 2005). In addition, skill-based risk-reducing behaviors, which require training in order to be effective, can be enhanced by social influences that promote the application of safety skills to reduce and prevent crashes. Hence, the results are consistent with policies that set limits on teenage passengers while novice teen drivers gain experience and skills essential for safe driving, and support the use of evidence-based training of higher order safety skills such as latent hazard anticipation.